Robot yang Bisa “Berinteraksi” dengan Ikan dan Lebah
Robot yang berinteraksi dengan ikan zebra di Lausanne-bertukar informasi dengan robot yang berinteraksi dengan lebah madu di Graz, Austria, Swiss, dan komunikasi robot mempengaruhi perilaku masing-masing kelompok hewan, menurut sebuah penelitian yang diterbitkan dalam Science Robotics kemarin (20 Maret).
“Ini pertama kalinya orang menggunakan teknologi semacam ini untuk memiliki dua marga yang tentunya berbeda dari cara mereka berkomunikasi satu sama lain, ” kata Simon Garnier.
Ahli biologi pada sistem kompleks yang berlokasi di New Jersey Institute of Technology yang tidak berpartisipasi dalam penelitian ini.”Ini adalah bukti konsep bahwa robot dapat memediasi interaksi antara kelompok yang jauh, ” tambahnya, bagaimanapun, bahwa aplikasi spesifik dari pengaturan semacam itu masih harus dilihat.
Sebagai teknologi robotika telah maju, ahli biologi telah berusaha untuk memanfaatkannya, membangun robot yang terlihat dan berperilaku seperti binatang. Ini telah memungkinkan para peneliti untuk mengontrol satu sisi interaksi sosial dalam studi perilaku hewan. Robot yang berhasil diintegrasikan ke dalam populasi hewan juga memberikan para ilmuwan sarana untuk memengaruhi perilaku kelompok.
Robot yang Berinteraksi dengan Ikan dan Lebah
“Langkah selanjutnya, kami berpikir untuk menambahkan fitur pada kelompok yang tidak dapat dilakukan oleh hewan karena mereka tidak memiliki kemampuan untuk melakukannya, ”José Halloy.
Seorang ahli fisika di Paris Diderot University yang telah bekerja mengembangkan robot untuk berinteraksi secara cerdas dengan hewan selama lebih dari satu dekade, menulis dalam email.”Hal yang sederhana dan mengejutkan adalah robot dapat menggunakan telekomunikasi atau Internet dan hewan tidak dapat melakukan itu.”
Dalam karya baru, Halloy bekerja sama dengan kolaborator di Institut Teknologi Federal Swiss (EPFL), Universitas Graz di Austria, dan di tempat lain untuk memiliki dua masyarakat robot hewan yang berbeda berinteraksi melalui teknologi komunikasi modern.

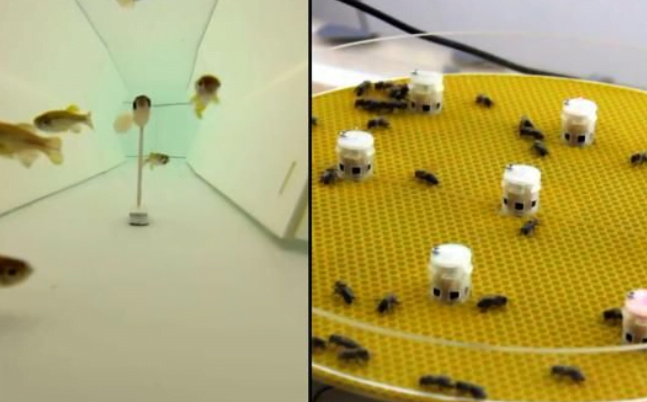
Para peneliti bekerja dengan dua spesies yang sangat berbeda yang biasanya tidak berinteraksi di alam-lebah madu dan ikan zebra-dan mereka menampung hewan-hewan percobaan yang terpisah lebih dari 1.000 kilometer.”Apa yang kami lakukan agak ekstrem, ” mengakui rekan penulis dan insinyur EPFL Frank Bonnet.
Dalam uji coba 30 menit, tim menyajikan hewan dengan pilihan kolektif. Dalam kasus lebah, pilihan itu adalah yang mana dari dua robot pemancar panas yang akan mereka kumpulkan, sedangkan ikan zebra, yang berbagi tangki berbentuk donat mereka dengan robot mirip ikan, akan memutuskan arah berenang yang mana.
Robot Berbicara dengan Ikan dan Lebah
Kedua robot di koloni lebah dan robot ikan berinteraksi dengan hewan asli saat percobaan berlangsung. Robot lebah memiliki sensor inframerah yang memungkinkan mereka memperkirakan kepadatan lebah di dekatnya, dan karena semakin banyak lebah berkerumun, robot menghasilkan lebih banyak panas, menarik lebih banyak lebah untuk berkumpul.
Robot ikan mendeteksi lokasi ikan dan dirinya sendiri dengan kamera merekam akuarium, dan menanggapi perubahan arah ikan sungguhan dengan mengikuti mayoritas, yang pada gilirannya memengaruhi keputusan kolektif kelompok tentang cara berenang.
Para peneliti kemudian menghubungkan kedua robot melalui koneksi internet. Ketika lebah condong ke satu robot atau lainnya, informasi itu dapat ditransfer ke robot ikan, yang menafsirkan berita sebagai lebih banyak ikan yang memilih arah berenang searah jarum jam atau berlawanan arah jarum jam.
Sebaliknya, informasi tentang arah berenang ikan dalam kelompok dapat ditransmisikan dari robot ikan ke robot lebah, yang menafsirkan sinyal sebagai lebih banyak lebah memilih bot tertentu.”Ketika kami membuat koneksi antara dua pengaturan, robot bertindak seperti penerjemah, ” kata Bonnet.
Pola Perilaku Hewan yang Terpengaruh
Dibiarkan menggunakan alat mereka sendiri, ikan zebra, sementara mereka umumnya berenang sebagai kelompok, jangan tetap berenang dalam satu arah; mereka sering berbalik arah.
Tetapi ketika robot ikan menerima informasi dari robot lebah, ikan akan mencapai konsensus selama beberapa menit atau lebih lama.
Itu karena lebah madu muda, ketika robot di koloni mereka tidak menerima informasi dari robot ikan, akan setelah sekitar 15 menit puas dengan salah satu dari dua robot.
Sebaliknya, pola renang ikan yang tidak pasti memengaruhi perilaku lebah madu. Jika robot ikan berbagi informasi dengan koloni lebah, lebah terus bergerak bolak-balik di antara dua pemanas selama 30 menit percobaan penuh.

Jika komunikasi dua arah, lebah menetap di sekitar salah satu dari dua bot di kandang, tetapi butuh sekitar lima menit lebih lama. Ini kemudian mengarahkan ikan untuk menetap di arah berenang.
“Secara teknis sangat mengesankan; Saya membeli argumen bahwa ada beberapa bentuk komunikasi, ”kata Garnier. Tapi dia bertanya-tanya bagaimana teknologi akan digunakan.”Saya tidak yakin di mana itu cocok dalam hal ilmu pengetahuan.”
Guy Theraulaz, yang mempelajari perilaku kolektif di Pusat Penelitian Kognisi Hewan di CNRS di Toulouse, Prancis, setuju. “Dari sudut pandang biologis, kami tidak mempelajari apa pun, ” ia mencatat, dan dari sudut pandang teknik, aspek kunci dari percobaan adalah integrasi robot ke dalam masyarakat hewan, yang telah dilakukan sebelumnya.”Mereka menjual sesuatu yang sedikit sepele, ” katanya.
Para peneliti berpendapat bahwa studi proof-of-concept menunjuk ke pendekatan baru untuk menginterogasi interaksi spesies alami, seperti robot yang telah digunakan untuk mempelajari perilaku sosial dalam spesies.”Ini memungkinkan kami melakukan percobaan dengan hewan untuk membangun model perilaku yang matematis, ” kata Halloy.
Nicole Abaid, seorang insinyur di Virginia Tech yang tidak terlibat dalam pekerjaan, juga bisa melihat jenis pekerjaan ini memberikan wawasan tentang cara terbaik untuk mengembangkan sistem robot multi-agen, seperti gerombolan robot, di mana banyak robot kecil dikerahkan secara bersamaan untuk aplikasi seperti pertanian presisi atau pencarian dan penyelamatan.
Sementara sebagian besar yang disebut sistem terdistribusi menggunakan banyak satu jenis robot, para insinyur mulai bereksperimen dengan perangkat dari berbagai jenis — misalnya, quadcopter dan kendaraan darat, kata Abaid.”Gagasan bahwa Anda bisa memiliki interaksi antarspesies dalam penerapan robotika sangat menarik.”
Tren Mingguan

Dalam era digital ini, internet membuka [...]

Di era digital saat ini, keterampilan [...]

Keamanan siber merupakan hal yang sangat [...]

Perkembangan teknologi komunikasi telah membuka peluang [...]

Git adalah salah satu sistem kontrol [...]

Trafik website adalah salah satu indikator [...]
Di zaman yang serba terhubung ini, [...]

Dalam dunia pemrograman, proses transformasi kode [...]



